Faculty of Architecture, Design and Planning, The University of Sydney
The University of Sydney, Faculty of Architecture, Design and Planning combines a diverse range of disciplines from Architectural Science and Technology, Urban Planning, Regional Planning, Design Science, Audio and Acoustics, Building Services, Illumination Design and Sustainable Design, Heritage Conservation to the Interaction Design.
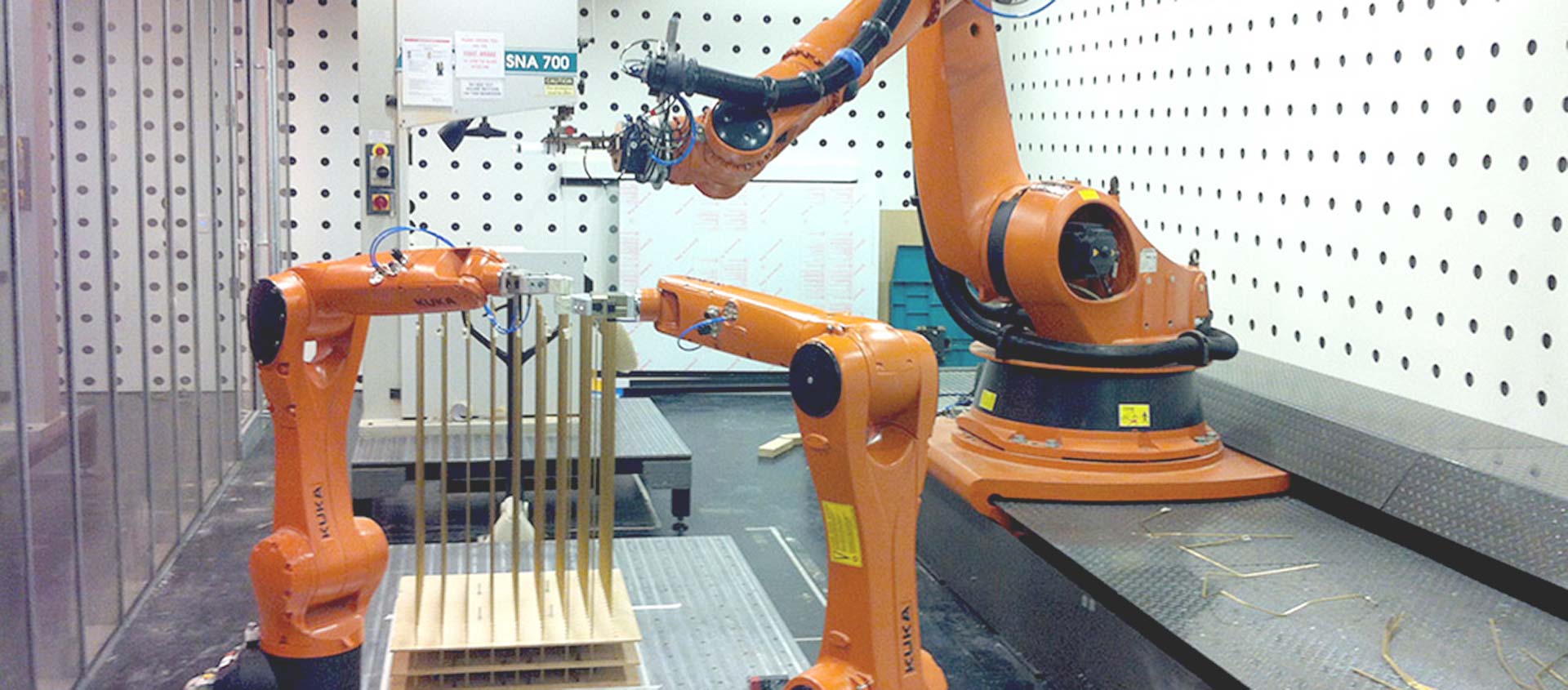
Its Architectural Robotics Lab is formed around research efforts involving robotics in architecture, art and design. Staff members from across the faculty in Architecture, Architectural Science and Design Research are involved in the lab together with PhD and Masters researchers conducting independent studies and graduate and undergraduate students engaged in design studios and research projects. Research projects being undertaking in the Architectural Robotics Lab include: manufacturing of acoustically efficient geometries; 3D printing of ceramic structures and sustainable aggregate materials; onsite fabrication composite structures for freeform construction; exploration of digital stereotomy for sandstone construction; machine learning for the assembly of non-uniform materials; inspection drones for surveying and monitoring heritage sandstone architecture; intrinsically motivated creative robotics; and, many-to-one human-robot interactions for crowded social environments. These research activities are supported by the extensive infrastructure provided by the Design, Modelling and Fabrication (DMaF) Lab, which includes KUKA industrial robot arms (KR60-3, KR10 R1100, KR6 R900), CNC milling and routing machines (Tormach PCNC 1100, Multicam 1200×2400), vacuum former, 3d printers, laser cutters and well-provisioned wood and metalastics labs.
www.sydney.edu.au
Dr Dagmar Reinhardt
 Dagmar Reinhardt is the co-chair of the ROB|ARCH2016, a practising architect, Program Director of the Bachelor of Architecture and Environments and Leader of the Master of Digital Architecture Research at the Faculty of Architecture, Design and Planning, The University of Sydney. Reinhardt’s research extends architectural performance and performativity towards design research and cross-disciplinary practice with audio-acoustics, and structural engineering. Her work focuses on engineering the acoustic behaviour of curved geometries through generative design and robotic fabrication, and in choreographing relationships between kinect sensing, fabricated materiality, and body movement. Her work with biome explores the mathematical language shared between scripting, sound/music, digital fabrication, interaction design and architecture (www.biome.cc). Her architecture practice reinhardtjung produces building projects, installations, curatorial work, research, publications, lectures and exhibitions in Europe and Australia, has been widely published, and received numerous awards (www.reinhardtjung.de).
Dagmar Reinhardt is the co-chair of the ROB|ARCH2016, a practising architect, Program Director of the Bachelor of Architecture and Environments and Leader of the Master of Digital Architecture Research at the Faculty of Architecture, Design and Planning, The University of Sydney. Reinhardt’s research extends architectural performance and performativity towards design research and cross-disciplinary practice with audio-acoustics, and structural engineering. Her work focuses on engineering the acoustic behaviour of curved geometries through generative design and robotic fabrication, and in choreographing relationships between kinect sensing, fabricated materiality, and body movement. Her work with biome explores the mathematical language shared between scripting, sound/music, digital fabrication, interaction design and architecture (www.biome.cc). Her architecture practice reinhardtjung produces building projects, installations, curatorial work, research, publications, lectures and exhibitions in Europe and Australia, has been widely published, and received numerous awards (www.reinhardtjung.de).
Dr Rob Saunders
 Rob Saunders is the co-chair of the ROB|ARCH2016, and Acting Head of the Design Lab in the Faculty of Architecture, Design and Planning at the University of Sydney. Rob’s research centres around creative application of computing, the computational modelling of creativity and the development of creative robotics. Using techniques from machine learning he has explored the role of curiosity in creative processes and developed models of creative systems at individual, social and cultural levels. His models of curious design agents have demonstrated useful abilities for autonomous design systems, including problem-finding and open-ended exploration. His models of social creativity exhibit emergent dynamics including clique formation and fashion cycles. Rob works with artists and designers across a range of disciplines to support and engage in the creative application of computing and robotics and has applied his research in the development of design customisation systems, smart environments, interactive installations and robotic artworks.
Rob Saunders is the co-chair of the ROB|ARCH2016, and Acting Head of the Design Lab in the Faculty of Architecture, Design and Planning at the University of Sydney. Rob’s research centres around creative application of computing, the computational modelling of creativity and the development of creative robotics. Using techniques from machine learning he has explored the role of curiosity in creative processes and developed models of creative systems at individual, social and cultural levels. His models of curious design agents have demonstrated useful abilities for autonomous design systems, including problem-finding and open-ended exploration. His models of social creativity exhibit emergent dynamics including clique formation and fashion cycles. Rob works with artists and designers across a range of disciplines to support and engage in the creative application of computing and robotics and has applied his research in the development of design customisation systems, smart environments, interactive installations and robotic artworks.
Marjo Niemelä
 Marjo Niemelä is the manager of the Design Modelling and Fabrication Lab (DMaF Lab) in the Faculty of Architecture, Design and Planning at the University of Sydney. The Finnish-born, architecturally trained furniture and fabrication expert has guided the development of the Faculty’s robotics and digital fabrication programs. The breadth and extent of facilities and expertise in the faculty today is a testament to her commitment to the importance and integration of fabrication across the numerous programs offered by the Faculty.
Marjo Niemelä is the manager of the Design Modelling and Fabrication Lab (DMaF Lab) in the Faculty of Architecture, Design and Planning at the University of Sydney. The Finnish-born, architecturally trained furniture and fabrication expert has guided the development of the Faculty’s robotics and digital fabrication programs. The breadth and extent of facilities and expertise in the faculty today is a testament to her commitment to the importance and integration of fabrication across the numerous programs offered by the Faculty.
Onsite Robots
Kuka KR10 R1100,
Kuka KR6 R900
Endeffectors
Small Milling Spindle, Hot Wire Cutter, Vacuum Grippers, 3D Printer and pump for clay/concrete
Workshop Facilities (Static Equipment)
Kuka KR60-3
CNC Router MultiCAM SR2412vi
Vacuum Former (Formech 686 PT)
3x Makerbot (ZCorp Spectrum 310/ and 510)